SLAM Tutorial
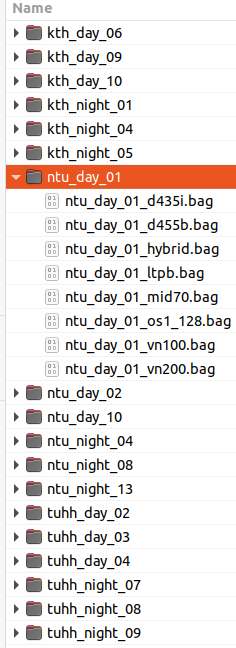
We assume that you have downloaded the rosbag files to a folder /path/to/MCD as in Fig. 1:
We try to create a consistent settings for the benchmark. Specifically, after compiling the code successfully, one only needs to seek out the run_mcdviral.launch file, modify the data_path and bag_file arguments, and then launch the method with roslaunch <method> run_mcdviral.launch. Some extra configurations for each method will also be noted.
LIO methods
The methods below can be configured to work in ouster-only mode, livox-only mode, or merged ouster-livox mode. If you are interested in having your method listed here. Please prepare your launch and configurations in the same manner and contact us to update this list.
SLICT
- Link: https://github.com/brytsknguyen/slict
- We recommend you test out this method successfully so that other methods can depend on some of its utilities.
- After successfully compiling the package, please modify the
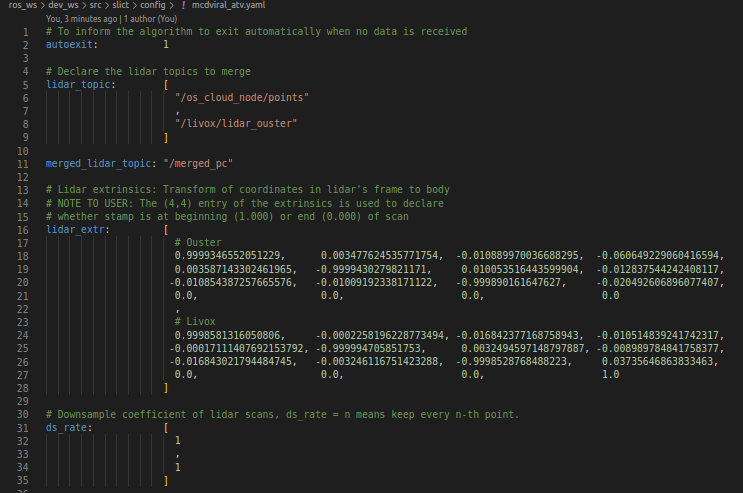
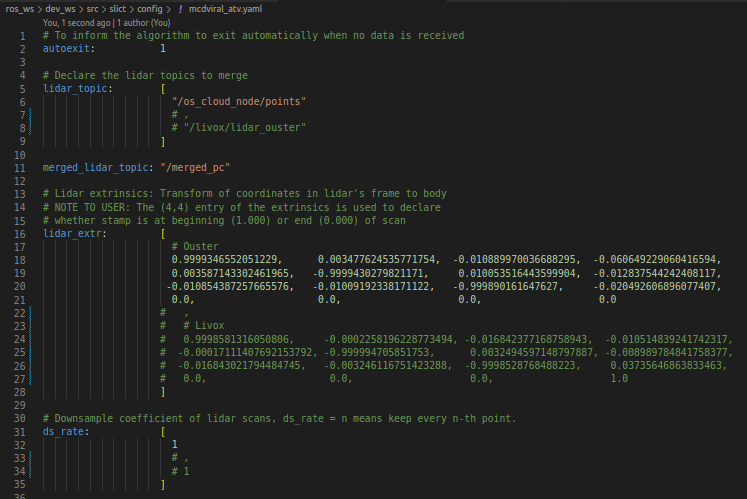
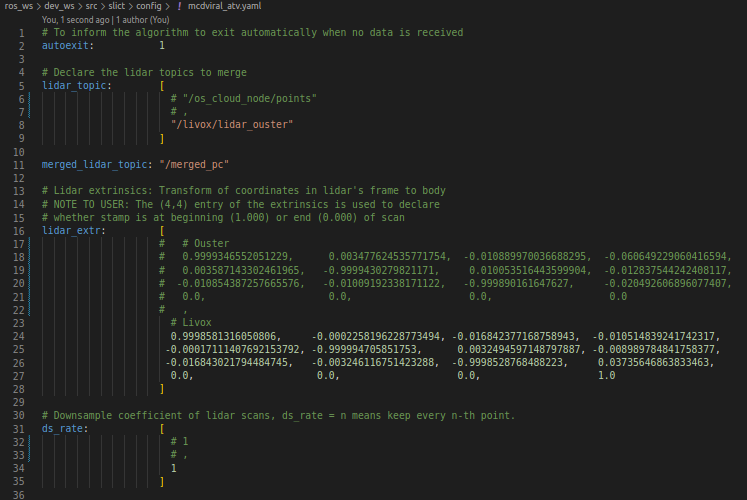
data_pathargument inrun_mcdviral.launchand launch it. - To configure SLICT to work with only ouster or livox, simply comment out the extrinsics in
slict/config/mcdviral_atv.yamlandslict/config/mcdviral_hhs.yamlas follows.
FAST_LIO
- Link: https://github.com/brytsknguyen/FAST_LIO
- The included
run_mcdviral.launchfile usesslict_livox_to_ousterandslict_merge_lidarin SLICT to convert livox pointcloud to ouster and them merge it with the ouster pointcloud to make a single input. You can change the fileslict/config/mcdviral_atv.yamlto run only the ouster or livox lidar as in the SLICT case. - Alternatively if you insist on running ouster (1 lidar only) and livox only without relying on SLICT, you can comment out the
slict_livox_to_ousterandslict_merge_lidarnodes and change the config file inrun_mcdviral.launch:<!-- Chose the config file based on the sequence names --> <arg name="config_file" value="mcdviral_atv" if="$(eval 'ntu_' in bag_file)" /> <arg name="config_file" value="mcdviral_hhs" if="$(eval 'kth_' in bag_file)" /> <arg name="config_file" value="mcdviral_hhs" if="$(eval 'tuhh_' in bag_file)" /> <rosparam command="load" file="$(find fast_lio)/config/$(arg config_file)_ouster.yaml" /> <!-- CHANGE TO _livox --> <!-- Run the livox to ouster converter --> <!-- <node pkg="slict" type="slict_livox_to_ouster" name="slict_livox_to_ouster" respawn="false" output="log" required="true"></node> --> <!-- Create the merge pointcloud --> <!-- <node pkg="slict" type="slict_merge_lidar" name="slict_merge_lidar" respawn="true" output="screen" required="false"> <rosparam file="$(find slict)/config/$(arg config_file).yaml" command="load"/> </node> -->
DLIO
- Link: https://github.com/brytsknguyen/dlio
- Default config is for merged lidar mode. Configuration for ouster or livox lidar mode is similar to SLICT. Since DLIO is a direct method, there is no special feature extraction for either ouster or livox, we recommend that you keep
slict_livox_to_ousterandslict_merge_lidarin therun_mcdviral.launchand only modify the extrinsics inslict/config/mcdviral_atv.yamlandslict/config/mcdviral_hhs.yamlto select the lidar type in single lidar mode.
CLIC
- Link: https://github.com/brytsknguyen/clic
- Note: you will also have to set the path to
clic/configfolder here and here. - Currently the launch file is set to run with LIVOX only mode. To change to ouster, you can change the
lidar_odom_yamlparam at here and here. - To run with merged lidar, change the
lidar_odom_yamlto/mcdviral_atv/lidar_mcdviral.yamlin the same way, and uncomment the following part in the launch file:<!-- Run the livox to ouster converter --> <!-- <node pkg="slict" type="slict_livox_to_ouster" name="slict_livox_to_ouster" respawn="false" output="log" required="true"></node> --> <!-- Create the merge pointcloud --> <!-- <node pkg="slict" type="slict_merge_lidar" name="slict_merge_lidar" respawn="true" output="screen" required="false"> <rosparam file="$(find slict)/config/mcdviral_$(arg dataset_cfg).yaml" command="load"/> </node> -->LIO-SAM
- Link: https://github.com/brytsknguyen/LIO-SAM
- The default configuration is with ouster lidar. Changing to merged pointcloud or livox pointcloud is similar to the previous cases.
VIO methods
VINS-Fusion
- Link: https://github.com/brytsknguyen/VINS-Fusion_Noetic_Focal
- The procedure is similar to LIO methods. Please clone the repo to your catkin workspace, build, and then set the path to MCD root under the
data_pathargument in therun_mcdviral.launchfile. - If you encounter any problem please raise an issue on the repo.
OPEN-VINS
- Link: https://github.com/brytsknguyen/open_vins
- The procedure is similar to all of the above. Please clone the repo to your catkin workspace, build, and then set the path to MCD root under the
data_pathargument in therun_mcdviral.launchfile. - If you encounter any problem please raise an issue on the repo.
KIMERA
- This method requires three repos
- Please follow the official instructions to install the package. The
run_mcdviral.launchfile can be found in the Kimera-VIO-ROS package. - If you encounter any problem please raise an issue on the repo.
Ranging-aided Methods
TBD